Projection vectorielle. Axes de coordonnées. Projection ponctuelle. Coordonnées du point sur l'axe. Projection (géométrique, algébrique) d'un vecteur sur un axe. Propriétés des projections Projection d'un vecteur sur un axe dans l'espace
Il y aura également des tâches pour une solution indépendante, dont vous pourrez voir les réponses.
Notion de vecteur
Avant de tout savoir sur les vecteurs et leurs opérations, connectez-vous pour résoudre un problème simple. Il y a un vecteur de votre entreprise et un vecteur de vos capacités d'innovation. Le vecteur de l'entrepreneuriat vous mène à l'objectif 1 et le vecteur des capacités d'innovation - à l'objectif 2. Les règles du jeu sont telles que vous ne pouvez pas vous déplacer dans les directions de ces deux vecteurs à la fois et atteindre deux objectifs à la fois. Les vecteurs interagissent ou, mathématiquement parlant, une opération est effectuée sur les vecteurs. Le résultat de cette opération est le vecteur "Résultat", qui vous mène au but 3.
Dites-moi maintenant : le résultat de quelle opération sur les vecteurs « Entreprise » et « Capacités d'innovation » est le vecteur « Résultat » ? Si vous ne pouvez pas le dire tout de suite, ne vous découragez pas. En étudiant cette leçon, vous serez en mesure de répondre à cette question.
Comme nous l'avons vu plus haut, le vecteur vient nécessairement d'un point UN en ligne droite jusqu'à un certain point B. Par conséquent, chaque vecteur a non seulement une valeur numérique - longueur, mais aussi une direction physique et géométrique. De là, la première définition la plus simple d'un vecteur est dérivée. Ainsi, un vecteur est un segment orienté partant d'un point UN jusqu'au point B. C'est marqué comme ça :

Et pour commencer différemment opérations vectorielles , nous devons nous familiariser avec une autre définition d'un vecteur.
Un vecteur est une sorte de représentation d'un point à atteindre à partir d'un point de départ. Par exemple, un vecteur tridimensionnel s'écrit généralement sous la forme (x, y, z) . En termes simples, ces chiffres représentent la distance que vous devez parcourir dans trois directions différentes pour en arriver au point.
Donnons un vecteur. Où X = 3 (la main droite pointe vers la droite) y = 1 (la main gauche pointe vers l'avant) z = 5 (sous le point il y a une échelle menant). A partir de ces données, vous trouverez le point en marchant 3 mètres dans le sens indiqué par la main droite, puis 1 mètre dans le sens indiqué par la main gauche, puis une échelle vous attend et, en montant 5 mètres, vous trouverez enfin vous-même au point final.
Tous les autres termes sont des raffinements de l'explication présentée ci-dessus, nécessaires pour diverses opérations sur les vecteurs, c'est-à-dire pour résoudre des problèmes pratiques. Passons en revue ces définitions plus rigoureuses, en nous attardant sur des problèmes vectoriels typiques.
Exemples physiques les grandeurs vectorielles peuvent être le déplacement d'un point matériel se déplaçant dans l'espace, la vitesse et l'accélération de ce point, ainsi que la force agissant sur lui.

vecteur géométrique représenté dans un espace bidimensionnel et tridimensionnel sous la forme segment dirigé. C'est un segment qui a un début et une fin.
Si UN est le début du vecteur, et B est sa fin, alors le vecteur est désigné par le symbole ou une seule lettre minuscule . Dans la figure, la fin du vecteur est indiquée par une flèche (Fig. 1)
Longueur(ou module) d'un vecteur géométrique est la longueur du segment qui le génère
Les deux vecteurs sont appelés égal , s'ils peuvent être combinés (lorsque les directions coïncident) par translation parallèle, c'est-à-dire s'ils sont parallèles, pointent dans la même direction et ont des longueurs égales.
En physique, on considère souvent vecteurs épinglés, donné par le point d'application, la longueur et la direction. Si le point d'application du vecteur n'a pas d'importance, il peut être transféré, en conservant la longueur et la direction vers n'importe quel point de l'espace. Dans ce cas, le vecteur est appelé gratuit. Nous convenons de ne considérer que vecteurs libres.
Opérations linéaires sur des vecteurs géométriques

Multiplier un vecteur par un nombre
Produit vectoriel par numéro Un vecteur est appelé un vecteur obtenu à partir d'un vecteur en étirant (à ) ou en rétrécissant (à ) fois, et la direction du vecteur est conservée si , et inversée si . (Fig. 2)
Il résulte de la définition que les vecteurs et = sont toujours situés sur une ou des droites parallèles. De tels vecteurs sont appelés colinéaire. (On peut aussi dire que ces vecteurs sont parallèles, mais en algèbre vectorielle il est d'usage de dire "colinéaire".) L'inverse est également vrai : si les vecteurs et sont colinéaires, alors ils sont liés par la relation
Par conséquent, l'égalité (1) exprime la condition de colinéarité de deux vecteurs.

Addition et soustraction de vecteurs
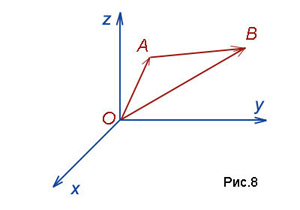
Lors de l'ajout de vecteurs, vous devez savoir que somme vecteurs et est appelé un vecteur dont le début coïncide avec le début du vecteur , et la fin coïncide avec la fin du vecteur , à condition que le début du vecteur soit attaché à la fin du vecteur . (Fig. 3)

Cette définition peut être distribuée sur n'importe quel nombre fini de vecteurs. Laisser dans l'espace donné n vecteurs libres. Lors de l'ajout de plusieurs vecteurs, leur somme est considérée comme le vecteur de fermeture, dont le début coïncide avec le début du premier vecteur et la fin avec la fin du dernier vecteur. Autrement dit, si le début du vecteur est attaché à la fin du vecteur, et le début du vecteur à la fin du vecteur, etc. et, enfin, à la fin du vecteur - le début du vecteur, alors la somme de ces vecteurs est le vecteur de fermeture ![]() , dont le début coïncide avec le début du premier vecteur , et dont la fin coïncide avec la fin du dernier vecteur . (Fig. 4)
, dont le début coïncide avec le début du premier vecteur , et dont la fin coïncide avec la fin du dernier vecteur . (Fig. 4)
Les termes sont appelés les composantes du vecteur, et la règle formulée est règle de polygone. Ce polygone peut ne pas être plat.
Lorsqu'un vecteur est multiplié par le nombre -1, le vecteur opposé est obtenu. Les vecteurs et ont la même longueur et des directions opposées. Leur somme donne vecteur nul, dont la longueur est nulle. La direction du vecteur nul n'est pas définie.
En algèbre vectorielle, il n'est pas nécessaire de considérer l'opération de soustraction séparément : soustraire un vecteur d'un vecteur signifie ajouter le vecteur opposé au vecteur, c'est-à-dire ![]()
Exemple 1 Simplifiez l'expression :
![]() .
.
 ,
,
c'est-à-dire que les vecteurs peuvent être ajoutés et multipliés par des nombres de la même manière que les polynômes (en particulier, également des problèmes de simplification des expressions). Habituellement, la nécessité de simplifier des expressions linéairement similaires avec des vecteurs se pose avant de calculer les produits de vecteurs.
Exemple 2 Les vecteurs et servent de diagonales du parallélogramme ABCD (Fig. 4a). Exprimez en termes de et les vecteurs , , et , qui sont les côtés de ce parallélogramme.

Solution. Le point d'intersection des diagonales d'un parallélogramme coupe en leur milieu chaque diagonale. Les longueurs des vecteurs nécessaires dans la condition du problème se trouvent soit comme la moitié des sommes des vecteurs qui forment un triangle avec ceux recherchés, soit comme la moitié des différences (selon la direction du vecteur servant de diagonale), ou, comme dans ce dernier cas, la moitié de la somme prise avec un signe moins. Le résultat est les vecteurs requis dans la condition du problème :
Il y a tout lieu de croire que vous avez maintenant correctement répondu à la question sur les vecteurs "Entreprise" et "Capacités d'innovation" au début de cette leçon. Bonne réponse : ces vecteurs sont soumis à une opération d'addition.
Résolvez les problèmes sur les vecteurs par vous-même, puis examinez les solutions
Comment trouver la longueur de la somme des vecteurs ?
Ce problème occupe une place particulière dans les opérations avec des vecteurs, car il implique l'utilisation de propriétés trigonométriques. Supposons que vous ayez une tâche comme celle-ci :
Étant donné la longueur des vecteurs ![]() et la longueur de la somme de ces vecteurs . Trouver la longueur de la différence de ces vecteurs .
et la longueur de la somme de ces vecteurs . Trouver la longueur de la différence de ces vecteurs .
Solutions à ce problème et à d'autres problèmes similaires et explications sur la façon de les résoudre - dans la leçon " Addition vectorielle : la longueur de la somme des vecteurs et le théorème du cosinus ".
Et vous pouvez vérifier la solution de ces problèmes sur Calculateur en ligne "Côté inconnu d'un triangle (addition vectorielle et théorème du cosinus)" .
Où sont les produits des vecteurs ?
Les produits d'un vecteur par un vecteur ne sont pas des opérations linéaires et sont considérés séparément. Et nous avons des leçons "Produit scalaire de vecteurs" et "Vecteur et produit mixte de vecteurs".
Projection d'un vecteur sur un axe
La projection d'un vecteur sur un axe est égale au produit de la longueur du vecteur projeté et du cosinus de l'angle entre le vecteur et l'axe :
![]()
Comme on le sait, la projection d'un point UN sur la ligne (plan) est la base de la perpendiculaire tombée de ce point à la ligne (plan).

Soit - un vecteur arbitraire (Fig. 5), et et - projections de son début (points UN) et fin (points B) par essieu je. (Pour construire la projection d'un point UN) tracer directement à travers le point UN plan perpendiculaire à la droite. L'intersection d'une ligne et d'un plan déterminera la projection requise.
Composante du vecteur sur l'axe l appelé un tel vecteur couché sur cet axe, dont le début coïncide avec la projection du début, et la fin - avec la projection de la fin du vecteur .
La projection du vecteur sur l'axe je appelé un numéro
![]() ,
,
égale à la longueur du vecteur composante sur cet axe, prise avec un signe plus si la direction de la composante coïncide avec la direction de l'axe je, et d'un signe moins si ces directions sont opposées.
Les principales propriétés des projections vectorielles sur l'axe :
1. Les projections de vecteurs égaux sur le même axe sont égales entre elles.
2. Lorsqu'un vecteur est multiplié par un nombre, sa projection est multipliée par le même nombre.
3. La projection de la somme des vecteurs sur n'importe quel axe est égale à la somme des projections sur le même axe des termes des vecteurs.
4. La projection d'un vecteur sur un axe est égale au produit de la longueur du vecteur projeté et du cosinus de l'angle entre le vecteur et l'axe :
![]()
 .
.

Solution. Projetons les vecteurs sur l'axe je tel que défini dans la référence théorique ci-dessus. D'après la Fig.5a, il est évident que la projection de la somme des vecteurs est égale à la somme des projections des vecteurs. Nous calculons ces projections :
On retrouve la projection finale de la somme des vecteurs :
Relation d'un vecteur avec un système de coordonnées cartésiennes rectangulaires dans l'espace
Connaissance de système de coordonnées cartésiennes rectangulaires dans l'espace a eu lieu dans la leçon correspondante, ouvrez-le de préférence dans une nouvelle fenêtre.
Dans un système ordonné d'axes de coordonnées 0xyz axe Bœuf appelé axe x, axe 0a – axe y, et l'axe 0z – appliquer l'axe.

avec point arbitraire M vecteur de cravate spatiale
appelé rayon vecteur points M et le projeter sur chacun des axes de coordonnées. Notons les valeurs des projections correspondantes :
Nombres x, y, z appelé coordonnées du point M, respectivement abscisse, ordonnée Et appliqué, et s'écrivent sous la forme d'un nombre ordonné : M(x ; y ; z)(Fig. 6).
Un vecteur de longueur unitaire dont la direction coïncide avec la direction de l'axe est appelé vecteur unitaire(ou ortom) axes. Dénoter par
En conséquence, les vecteurs unitaires des axes de coordonnées Bœuf, Oy, onces
![]()
Théorème. Tout vecteur peut être décomposé en vecteurs unitaires des axes de coordonnées :

![]() (2)
(2)
L'égalité (2) est appelée l'expansion du vecteur le long des axes de coordonnées. Les coefficients de cette expansion sont les projections du vecteur sur les axes de coordonnées. Ainsi, les coefficients d'expansion (2) du vecteur le long des axes de coordonnées sont les coordonnées du vecteur.
Après avoir choisi un certain système de coordonnées dans l'espace, le vecteur et le triple de ses coordonnées se déterminent de manière unique, de sorte que le vecteur peut être écrit sous la forme
Les représentations vectorielles sous la forme (2) et (3) sont identiques.
La condition des vecteurs colinéaires en coordonnées
Comme nous l'avons déjà noté, les vecteurs sont dits colinéaires s'ils sont liés par la relation
Laissez les vecteurs ![]() . Ces vecteurs sont colinéaires si les coordonnées des vecteurs sont liées par la relation
. Ces vecteurs sont colinéaires si les coordonnées des vecteurs sont liées par la relation
![]() ,
,
c'est-à-dire que les coordonnées des vecteurs sont proportionnelles.
Exemple 6 Vecteurs donnés ![]() . Ces vecteurs sont-ils colinéaires ?
. Ces vecteurs sont-ils colinéaires ?
Solution. Découvrons le rapport des coordonnées de ces vecteurs:
![]() .
.
Les coordonnées des vecteurs sont proportionnelles, donc les vecteurs sont colinéaires ou, ce qui revient au même, parallèles.
Cosinus de longueur et de direction du vecteur
En raison de la perpendicularité mutuelle des axes de coordonnées, la longueur du vecteur
![]()
est égale à la longueur de la diagonale d'un parallélépipède rectangle construit sur les vecteurs
et s'exprime par l'égalité
![]() (4)
(4)
Un vecteur est complètement défini en spécifiant deux points (début et fin), de sorte que les coordonnées du vecteur peuvent être exprimées en termes de coordonnées de ces points.
Soit le début du vecteur dans le système de coordonnées donné au point
et la fin est au point
De l'égalité
S'ensuit que
ou sous forme de coordonnées
Ainsi, les coordonnées du vecteur sont égales aux différences des coordonnées de même nom de la fin et du début du vecteur . La formule (4) prend dans ce cas la forme
La direction du vecteur est déterminée cosinus directeurs . Ce sont les cosinus des angles que fait le vecteur avec les axes Bœuf, Oy Et onces. Désignons respectivement ces angles α , β Et γ . Ensuite, les cosinus de ces angles peuvent être trouvés par les formules
Les cosinus directeurs d'un vecteur sont également les coordonnées du vecteur du vecteur et donc du vecteur du vecteur

![]() .
.
Considérant que la longueur du vecteur vecteur est égale à une unité, c'est-à-dire
![]() ,
,
on obtient l'égalité suivante pour les cosinus directeurs :
Exemple 7 Trouver la longueur d'un vecteur X = (3; 0; 4).
Solution. La longueur du vecteur est
![]()
Exemple 8 Points donnés :
Découvrez si le triangle construit sur ces points est isocèle.
Solution. En utilisant la formule de longueur vectorielle (6), nous trouvons les longueurs des côtés et découvrons s'il y en a deux égales :

Deux côtés égaux ont été trouvés, il n'est donc pas nécessaire de chercher la longueur du troisième côté, et le triangle donné est isocèle.
Exemple 9 Trouver la longueur d'un vecteur et ses cosinus directeurs si ![]() .
.
Solution. Les coordonnées du vecteur sont données :
![]() .
.
La longueur du vecteur est égale à la racine carrée de la somme des carrés des coordonnées du vecteur :
![]() .
.
Recherche des cosinus directeurs :

Résolvez vous-même le problème sur les vecteurs, puis examinez la solution
Opérations sur des vecteurs donnés sous forme de coordonnées
Soient deux vecteurs et donnés par leurs projections :
![]()
![]()
Indiquons les actions sur ces vecteurs.
Répondre:
Propriétés de projection :
Propriétés de projection vectorielle
Propriété 1.
La projection de la somme de deux vecteurs sur un axe est égale à la somme des projections de vecteurs sur le même axe : ![]()
Cette propriété permet de remplacer la projection de la somme des vecteurs par la somme de leurs projections et inversement.
Propriété 2. Si un vecteur est multiplié par le nombre λ, alors sa projection sur l'axe est également multipliée par ce nombre :
![]()
Propriété 3.
La projection d'un vecteur sur l'axe l est égale au produit du module du vecteur et du cosinus de l'angle entre le vecteur et l'axe :
Axe ortho. Décomposition d'un vecteur en termes de vecteurs de coordonnées. Coordonnées vectorielles. Coordonner les propriétés
Répondre:
Hors d'axes.

Un système de coordonnées rectangulaires (de n'importe quelle dimension) est également décrit par un ensemble de vecteurs unitaires alignés avec les axes de coordonnées. Le nombre d'orts est égal à la dimension du système de coordonnées et ils sont tous perpendiculaires les uns aux autres.
Dans le cas tridimensionnel, les orts sont généralement notés
ET Les symboles avec des flèches et peuvent également être utilisés.
De plus, dans le cas d'un système de coordonnées à droite, les formules suivantes avec des produits vectoriels de vecteurs sont valables :
Décomposition d'un vecteur en termes de vecteurs de coordonnées.
L'orth de l'axe de coordonnées est désigné par , axes - par , axes - par (Fig. 1)

Pour tout vecteur situé dans un plan, la décomposition suivante a lieu :
Si le vecteur ![]() est situé dans l'espace, alors le développement en termes de vecteurs unitaires des axes de coordonnées a la forme :
est situé dans l'espace, alors le développement en termes de vecteurs unitaires des axes de coordonnées a la forme :
Coordonnées vectorielles :
Pour calculer les coordonnées d'un vecteur, connaissant les coordonnées (x1; y1) de son début A et les coordonnées (x2; y2) de sa fin B, il faut soustraire les coordonnées du début aux coordonnées de fin : (x2 - x1 ; y2 - y1).
Coordonner les propriétés.
Considérons une ligne de coordonnées avec l'origine au point O et un vecteur unitaire i. Alors pour tout vecteur a sur cette droite : a = axi.
L'axe des nombres est appelé la coordonnée du vecteur a sur l'axe des coordonnées.
Propriété 1. Lors de l'ajout de vecteurs sur l'axe, leurs coordonnées sont ajoutées.
Propriété 2. Lorsqu'un vecteur est multiplié par un nombre, sa coordonnée est multipliée par ce nombre.
Produit scalaire de vecteurs. Propriétés.
Répondre:
Le produit scalaire de deux vecteurs non nuls est un nombre,
égal au produit de ces vecteurs par le cosinus de l'angle qui les sépare.
![]()
![]()
Propriétés:
1. Le produit scalaire a une propriété commutative : ab=ba

Produit scalaire de vecteurs de coordonnées. Détermination du produit scalaire de vecteurs donnés par leurs coordonnées.
Répondre:
Produit scalaire (×) orts
| (X) | je | J | K |
| je | |||
| J | |||
| K |
Détermination du produit scalaire de vecteurs donnés par leurs coordonnées.
Le produit scalaire de deux vecteurs et donné par leurs coordonnées peut être calculé par la formule
![]()
Produit vectoriel de deux vecteurs. Propriétés du produit vectoriel.
Répondre:
Trois vecteurs non coplanaires forment un triplet droit si, à partir de la fin du troisième vecteur, la rotation du premier vecteur au second se fait dans le sens inverse des aiguilles d'une montre. Si dans le sens des aiguilles d'une montre - alors à gauche., sinon, alors dans le sens opposé ( montrer comment il a montré avec des "poignées")
Produit croisé d'un vecteur UN par vecteur b appelé vecteur avec lequel:
1. Perpendiculaire aux vecteurs UN Et b
2. A une longueur numériquement égale à l'aire du parallélogramme formé sur un Et b vecteurs
![]()
3. Vecteurs, un B, Et c former le bon triplet de vecteurs
Propriétés:
1. ![]()
3. ![]()
4. ![]()

Produit vectoriel de vecteurs de coordonnées. Détermination du produit vectoriel de vecteurs donnés par leurs coordonnées.
Répondre:
Produit vectoriel de vecteurs de coordonnées.

Détermination du produit vectoriel de vecteurs donnés par leurs coordonnées.
Soient les vecteurs a = (x1; y1; z1) et b = (x2; y2; z2) donnés par leurs coordonnées dans le repère cartésien rectangulaire O, i, j, k, et le triplet i, j, k est droite.
Nous développons a et b en termes de vecteurs de base :
une = X 1 je + y 1 j + z 1 k, b = X 2 je + y 2 j + z 2 k.
En utilisant les propriétés du produit vectoriel, on obtient
[UN; b] ==
= x 1 x 2 + x 1 y 2 + x 1 z 2 +
+ y 1 x 2 + y 1 y 2 + y 1 z 2 +
+ z 1 x 2 + z 1 y 2 + z 1 z 2 . (1)
Par la définition d'un produit vectoriel, on trouve
= 0, = k, = - j,
= - k, = 0, = je,
= j, = - je. = 0.
Compte tenu de ces égalités, la formule (1) peut s'écrire comme suit :
[UN; b] = X 1 y 2 k - X 1 z 2 j - y 1 x 2 k + y 1 z 2 je + z 1 x 2 j - z 1 y 2 je
[UN; b] = (y 1 z 2 - z 1 y 2) je + (z 1 x 2 - x 1 z 2) j + (x 1 y 2 - y 1 x 2) k. (2)
La formule (2) donne une expression du produit croisé de deux vecteurs donnés par leurs coordonnées.
La formule résultante est lourde, en utilisant la notation des déterminants, vous pouvez l'écrire sous une autre forme plus pratique pour la mémorisation :
Habituellement, la formule (3) est écrite encore plus courte :

La résolution de problèmes d'équilibre de forces convergentes en construisant des polygones de forces fermés est associée à des constructions lourdes. Une méthode universelle pour résoudre de tels problèmes est la transition vers la détermination des projections de forces données sur les axes de coordonnées et le fonctionnement avec ces projections. L'axe s'appelle une ligne droite, à laquelle est assignée une certaine direction.
La projection d'un vecteur sur un axe est une valeur scalaire, qui est déterminée par le segment de l'axe coupé par les perpendiculaires déposées sur celui-ci depuis le début et la fin du vecteur.
La projection d'un vecteur est considérée comme positive si la direction du début de la projection à sa fin coïncide avec la direction positive de l'axe. La projection d'un vecteur est considérée comme négative si la direction du début de la projection à sa fin est opposée à la direction positive de l'axe.
Ainsi, la projection de la force sur l'axe des coordonnées est égale au produit du module de la force et du cosinus de l'angle entre le vecteur force et la direction positive de l'axe.
Considérons un certain nombre de cas de projection de forces sur un axe :
Vecteur de force F(Fig. 15) fait un angle aigu avec la direction positive de l'axe des abscisses.

Pour trouver la projection, du début et de la fin du vecteur force on abaisse les perpendiculaires à l'axe Oh; on a
1. Effet = F cosα
La projection du vecteur dans ce cas est positive
Force F(Fig. 16) est avec le sens positif de l'axe X angle obtus α.

Alors F x= F cos α, mais puisque α = 180 0 - φ,
F x= F cosα = F cos180 0 - φ =- F cosphi.
Projection de force F par essieu Oh dans ce cas est négatif.
Force F(Fig. 17) perpendiculaire à l'axe Oh.

Projection de la force F sur l'axe X zéro
F x= F cos 90° = 0.
Force située sur un plan comment(Fig. 18), peut être projeté sur deux axes de coordonnées Oh Et UO.

Force F peut être décomposé en composants : F x et F y. Module vectoriel F x est égal à la projection vectorielle F par essieu bœuf, et le module du vecteur F y est égal à la projection du vecteur F par essieu oy.
De ∆ OAB: F x= F cosα, F x= F sinα.
De ∆ SLA: F x= F cosphi, F x= F péché phi.
Le module de force peut être trouvé en utilisant le théorème de Pythagore :
![]()
La projection de la somme vectorielle ou de la résultante sur un axe quelconque est égale à la somme algébrique des projections des termes des vecteurs sur le même axe.
Tenir compte des forces convergentes F 1 , F 2 , F 3 , et F 4, (fig. 19, a). La somme géométrique, ou résultante, de ces forces F déterminé par le côté de fermeture du polygone de force


Déposer des sommets du polygone de force sur l'axe X perpendiculaires.
Considérant les projections de forces obtenues directement à partir de la construction achevée, nous avons
F= F 1x+ F 2x+ F 3x+ F 4x
où n est le nombre de termes des vecteurs. Leurs projections entrent dans l'équation ci-dessus avec le signe approprié.
Dans un plan, la somme géométrique des forces peut être projetée sur deux axes de coordonnées, et dans l'espace, respectivement, sur trois.
projection vecteur sur un axe est appelé un vecteur, qui est obtenu en multipliant la projection scalaire d'un vecteur sur cet axe et le vecteur unitaire de cet axe. Par exemple, si un x est projection scalaire vecteur UN en abscisse, alors un x je- sa projection vectorielle sur cet axe.
Dénoter projection vectorielle tout comme le vecteur lui-même, mais avec l'indice de l'axe sur lequel le vecteur est projeté. Ainsi, la projection vectorielle du vecteur UN sur l'axe des abscisses dénotent UN X ( huileux une lettre désignant un vecteur et un indice du nom de l'axe) ou (une lettre non grasse désignant un vecteur, mais avec une flèche en haut (!) et un indice du nom de l'axe).
Projection scalaire vecteur par axe est appelé nombre, dont la valeur absolue est égale à la longueur du segment de l'axe (dans l'échelle choisie) compris entre les projections du point de départ et du point d'arrivée du vecteur. Généralement au lieu de l'expression projection scalaire dites simplement - projection. La projection est désignée par la même lettre que le vecteur projeté (en écriture normale, non grasse), avec un indice (généralement) du nom de l'axe sur lequel ce vecteur est projeté. Par exemple, si un vecteur est projeté sur l'axe des x UN, alors sa projection est notée a x . Lors de la projection du même vecteur sur un autre axe, si l'axe est Y , sa projection sera notée y .
Pour calculer la projection vecteur sur un axe (par exemple, l'axe X) il faut soustraire la coordonnée du point de départ de la coordonnée de son point final, c'est-à-dire
et x \u003d x k - x n.
La projection d'un vecteur sur un axe est un nombre. De plus, la projection peut être positive si la valeur de x k est supérieure à la valeur de x n,
négatif si la valeur de x k est inférieure à la valeur de x n
et égal à zéro si x k est égal à x n.
La projection d'un vecteur sur un axe peut également être trouvée en connaissant le module du vecteur et l'angle qu'il fait avec cet axe.
On peut voir sur la figure que a x = a Cos α
c'est-à-dire que la projection du vecteur sur l'axe est égale au produit du module du vecteur et du cosinus de l'angle entre la direction de l'axe et direction du vecteur. Si l'angle est aigu, alors
Cos α > 0 et a x > 0, et si obtus, alors le cosinus d'un angle obtus est négatif, et la projection du vecteur sur l'axe sera également négative.
Les angles comptés à partir de l'axe dans le sens antihoraire sont considérés comme positifs et dans le sens - négatif. Cependant, comme le cosinus est une fonction paire, c'est-à-dire que Cos α = Cos (− α), lors du calcul des projections, les angles peuvent être comptés dans le sens des aiguilles d'une montre et dans le sens inverse des aiguilles d'une montre.
Pour trouver la projection d'un vecteur sur un axe, il faut multiplier le module de ce vecteur par le cosinus de l'angle entre la direction de l'axe et la direction du vecteur.
Coordonnées vectorielles sont les coefficients de la seule combinaison linéaire possible de vecteurs de base dans le système de coordonnées choisi égal au vecteur donné.
où sont les coordonnées du vecteur.
Produit scalaire de vecteurs
SCOAL PRODUIT DE VECTEURS[- en dimension finie espace vectoriel est défini comme la somme des produits des mêmes composantes de la valeur multipliée vecteurs.
Par exemple, S. p. un = (un 1 , ..., un) Et b = (b 1 , ..., b n):
(un , b ) = un 1 b 1 + un 2 b 2 + ... + une n b n
UN. La projection du point A sur l'axe PQ (Fig. 4) est la base a de la perpendiculaire abaissée d'un point donné à un axe donné. L'axe sur lequel on projette s'appelle l'axe de projection.
b. Soit deux axes et un vecteur A B donnés, comme le montre la Fig. 5.

Le vecteur dont le début est la projection du début et de la fin - la projection de la fin de ce vecteur, s'appelle la projection du vecteur A B sur l'axe PQ, Il s'écrit ainsi ;
![]()
Parfois, l'indicateur PQ n'est pas écrit en bas, cela se fait dans les cas où, à part PQ, il n'y a pas d'autre axe sur lequel projeter.
Avec. Théorème I. Les valeurs des vecteurs situés sur le même axe sont liées comme les valeurs de leurs projections sur n'importe quel axe.

Donnons les axes et les vecteurs illustrés à la figure 6. De la similitude des triangles, on peut voir que les longueurs des vecteurs sont liées comme les longueurs de leurs projections, c'est-à-dire
![]()
Étant donné que les vecteurs du dessin sont dirigés dans des directions différentes, leurs amplitudes ont des valeurs différentes, par conséquent,
![]()
Évidemment, les valeurs de projection ont également un signe différent :
![]()
en substituant (2) à (3) à (1), on obtient
![]()
En inversant les signes, on obtient
![]()
Si les vecteurs sont également dirigés, alors il y aura une direction et leurs projections; il n'y aura pas de signe moins dans les formules (2) et (3). En substituant (2) et (3) dans l'égalité (1), on obtient immédiatement l'égalité (4). Ainsi, le théorème est prouvé pour tous les cas.

d. Théorème II. La valeur de la projection d'un vecteur sur n'importe quel axe est égale à la valeur du vecteur multipliée par le cosinus de l'angle entre l'axe des projections et l'axe du vecteur. Laissez le vecteur être donné à l'axe comme indiqué sur la figure . 7. Construisons un vecteur également dirigé avec son axe et reporté, par exemple, du point d'intersection des axes. Soit sa longueur égale à un. Alors sa valeur
![]()
Nouveaux articles
- Pourquoi le mal de mer survient-il ?
- Comment rechercher des gisements d'argile Où le sable et l'argile sont extraits
- Que fait le foie dans le corps
- Effet de serre dans l'atmosphère : causes et conséquences
- Bonne recette de pâte à nouilles maison
- Quelles sont les années du Moyen Âge
- L'ère du Moyen Âge en bref
- Renard: faits intéressants sur le renard roux Faits intéressants de la vie des renards
- Quels sont les bienfaits de l'ortie pour l'homme ?
- Chewing-gum. Comment est fabriqué le chewing-gum ? Comment faire du chewing-gum soi-même ? Comment les élastiques sont fabriqués à l'usine
Articles populaires
- Combien pèse en moyenne un ours ?
- Galileo Galilei - une biographie de la vie et de ses découvertes Où Galileo Galilei est né et a vécu
- Que signifie l'expression « travail de Sisyphe » ?
- Déclinaison de l'abréviation gost
- Fruits de la mite. Dicotylédone. Famille des légumineuses (papillons). Qu'avons-nous appris
- Comment creuser et conserver des tubercules de dahlia: instructions détaillées
- Que montre un frottis sur la flore chez les femmes?
- Discours du père de la mariée au mariage
- Coordonnées cartésiennes des points plans
- Comment porter un jean taille haute : les secrets de style