Vektorska projekcija. Koordinatne osi. Točkovna projekcija. Koordinate točk na osi. Projekcija (geometrična, algebraična) vektorja na os. Lastnosti projekcij Projekcija vektorja na os v prostoru
Na voljo bodo tudi naloge za samostojno reševanje, katerih odgovore si lahko ogledate.
Vektorski koncept
Preden se naučite vse o vektorjih in operacijah na njih, se vključite v rešitev preprostega problema. Obstaja vektor vaše podjetnosti in vektor vaših inovativnih sposobnosti. Vektor podjetnosti te vodi do cilja 1, vektor inovativnih sposobnosti pa do cilja 2. Pravila igre so takšna, da se ne moreš premikati v smeri teh dveh vektorjev hkrati in dosegati dva cilja hkrati. Vektorji medsebojno delujejo ali, če govorimo matematično, se na vektorjih izvaja neka operacija. Rezultat te operacije je vektor "Rezultat", ki vas pripelje do cilja 3.
Zdaj pa mi povejte: rezultat katere operacije na vektorjih "Enterprise" in "Innovative abilities" je vektor "Result"? Če ne morete povedati takoj, naj vas ne obupa. Ko boste preučevali to lekcijo, boste lahko odgovorili na to vprašanje.
Kot smo videli zgoraj, vektor nujno prihaja iz neke točke A v ravni črti do neke točke B. Posledično ima vsak vektor ne samo numerično vrednost - dolžino, temveč tudi fizično in geometrijsko - smer. Iz tega izhaja prva, najpreprostejša definicija vektorja. Vektor je torej usmerjen segment, ki gre iz točke A do točke B. Označeno je takole:

In začeti drugače vektorske operacije , se moramo seznaniti še z eno definicijo vektorja.
Vektor je neke vrste predstavitev točke, ki jo je treba doseči z neke začetne točke. Na primer, tridimenzionalni vektor je običajno zapisan kot (x, y, z) . Preprosto povedano, te številke predstavljajo, kako daleč morate iti v treh različnih smereh, da pridete do bistva.
Naj bo podan vektor. pri čemer x = 3 (desna roka kaže na desno) l = 1 (leva roka kaže naprej) z = 5 (pod točko je lestev, ki vodi navzgor). Iz teh podatkov boste točko našli tako, da hodite 3 metre v smeri, ki jo kaže desna roka, nato 1 meter v smeri, ki jo kaže leva roka, nato pa vas čaka lestev, po kateri se povzpnete 5 metrov, končno najdete sebe na končni točki.
Vsi ostali izrazi so izboljšave zgoraj predstavljene razlage, potrebne za različne operacije na vektorjih, torej za reševanje praktičnih problemov. Oglejmo si te strožje definicije in se posvetimo tipičnim vektorskim problemom.
Fizični primeri vektorske količine so lahko premik materialne točke, ki se giblje v prostoru, hitrost in pospešek te točke, pa tudi sila, ki deluje nanjo.

geometrijski vektor predstavljen v dvodimenzionalnem in tridimenzionalnem prostoru v obliki usmerjen segment. To je segment, ki ima začetek in konec.
če A je začetek vektorja in B je njegov konec, potem je vektor označen s simbolom ali eno samo malo črko . Na sliki je konec vektorja označen s puščico (slika 1)
Dolžina(oz modul) geometrijskega vektorja je dolžina segmenta, ki ga generira
Dva vektorja se imenujeta enaka , če jih je mogoče združiti (ko smeri sovpadajo) z vzporednim prevajanjem, tj. če sta vzporedni, kažeta v isto smer in sta enaki dolžini.
V fiziki se pogosto upošteva pripeti vektorji, podano s točko nanosa, dolžino in smerjo. Če točka uporabe vektorja ni pomembna, ga je mogoče prenesti, pri čemer ohranite dolžino in smer na katero koli točko v prostoru. V tem primeru se imenuje vektor prost. Strinjamo se, da upoštevamo samo prosti vektorji.
Linearne operacije na geometrijskih vektorjih

Pomnožite vektor s številom
Vektorski izdelek na številko Vektor se imenuje vektor, dobljen iz vektorja z raztezanjem (pri ) ali krčenjem (pri ) časih, smer vektorja pa se ohrani, če , in obrne, če . (slika 2)
Iz definicije sledi, da se vektorja in = vedno nahajata na eni ali vzporednih premicah. Takšni vektorji se imenujejo kolinearni. (Lahko tudi rečete, da so ti vektorji vzporedni, vendar je v vektorski algebri običajno reči "kolinearni".) Velja tudi obratno: če sta vektorja in kolinearna, potem sta povezana z razmerjem
Zato enakost (1) izraža pogoj kolinearnosti dveh vektorjev.

Vektorsko seštevanje in odštevanje
Ko dodajate vektorje, morate to vedeti vsota vektorji in se imenuje vektor, katerega začetek sovpada z začetkom vektorja, konec pa s koncem vektorja, pod pogojem, da je začetek vektorja vezan na konec vektorja. (slika 3)

To definicijo lahko porazdelimo na poljubno končno število vektorjev. Naj v danem prostoru n brezplačni vektorji. Pri seštevanju več vektorjev se njihova vsota vzame kot zaključni vektor, katerega začetek sovpada z začetkom prvega vektorja, konec pa s koncem zadnjega vektorja. To je, če je začetek vektorja pritrjen na konec vektorja in začetek vektorja na konec vektorja itd. in končno do konca vektorja - začetek vektorja, potem je vsota teh vektorjev zaključni vektor ![]() , katerega začetek sovpada z začetkom prvega vektorja in katerega konec sovpada s koncem zadnjega vektorja . (slika 4)
, katerega začetek sovpada z začetkom prvega vektorja in katerega konec sovpada s koncem zadnjega vektorja . (slika 4)
Izraze imenujemo komponente vektorja, formulirano pravilo pa pravilo poligona. Ta mnogokotnik morda ni raven.
Ko vektor pomnožimo s številom -1, dobimo nasprotni vektor. Vektorja in imata enako dolžino in nasprotni smeri. Njihova vsota daje ničelni vektor, katere dolžina je nič. Smer ničelnega vektorja ni definirana.
V vektorski algebri operacije odštevanja ni treba obravnavati ločeno: odšteti vektor od vektorja pomeni vektorju dodati nasprotni vektor, tj. ![]()
Primer 1 Poenostavite izraz:
![]() .
.
 ,
,
to pomeni, da lahko vektorje seštevamo in množimo s števili na enak način kot polinome (predvsem tudi težave pri poenostavljanju izrazov). Običajno se potreba po poenostavitvi linearno podobnih izrazov z vektorji pojavi pred izračunom produktov vektorjev.
Primer 2 Vektorja in služita kot diagonali paralelograma ABCD (slika 4a). Izrazite z in vektorji , , in , ki so stranice tega paralelograma.

rešitev. Presek diagonal paralelograma razpolovi vsako diagonalo. Dolžine vektorjev, zahtevane v pogoju problema, se najdejo bodisi kot polovične vsote vektorjev, ki z želenimi tvorijo trikotnik, bodisi kot polovične razlike (odvisno od smeri vektorja, ki služi kot diagonala), ali, kot v slednjem primeru, polovica vsote, vzeta z znakom minus. Rezultat so vektorji, potrebni v pogoju problema:
Obstajajo vsi razlogi za domnevo, da ste zdaj pravilno odgovorili na vprašanje o vektorjih "Podjetnost" in "Inovativne sposobnosti" na začetku te lekcije. Pravilen odgovor: ti vektorji so podvrženi operaciji dodajanja.
Samostojno rešite naloge na vektorjih in si nato oglejte rešitve
Kako najti dolžino vsote vektorjev?
Ta problem zavzema posebno mesto pri operacijah z vektorji, saj gre za uporabo trigonometričnih lastnosti. Recimo, da imate nalogo, kot je ta:
Glede na dolžino vektorjev ![]() in dolžina vsote teh vektorjev. Poiščite dolžino razlike teh vektorjev.
in dolžina vsote teh vektorjev. Poiščite dolžino razlike teh vektorjev.
Rešitve tega in drugih podobnih težav ter razlage, kako jih rešiti - v lekciji " Vektorski seštevek: dolžina vsote vektorjev in kosinusni izrek ".
Rešitev takšnih težav pa lahko preverite na Spletni kalkulator "Neznana stranica trikotnika (seštevanje vektorjev in kosinusni izrek)" .
Kje so produkti vektorjev?
Produkti vektorja za vektorjem niso linearne operacije in se obravnavajo ločeno. In imamo lekcije "Točkovni produkt vektorjev" in "Vektorski in mešani produkt vektorjev".
Projekcija vektorja na os
Projekcija vektorja na os je enaka produktu dolžine projiciranega vektorja in kosinusa kota med vektorjem in osjo:
![]()
Kot je znano, projekcija točke A na premici (ravnini) je osnova navpičnice, spuščene iz te točke na premico (ravnino).

Naj - poljuben vektor (slika 5) in in - projekcije njegovega začetka (točke A) in konec (pike B) na os l. (Za izgradnjo projekcije točke A) potegnite naravnost skozi točko A ravnina, pravokotna na premico. Presečišče premice in ravnine bo določilo zahtevano projekcijo.
Komponenta vektorja na osi l imenujemo tak vektor, ki leži na tej osi, katerega začetek sovpada s projekcijo začetka, konec pa s projekcijo konca vektorja .
Projekcija vektorja na os l poklical številko
![]() ,
,
enaka dolžini vektorja komponente na tej osi, vzeta z znakom plus, če smer komponente sovpada s smerjo osi l, in z znakom minus, če sta ti smeri nasprotni.
Glavne lastnosti vektorskih projekcij na os:
1. Projekcije enakih vektorjev na isto os so med seboj enake.
2. Ko vektor pomnožimo s številom, se njegova projekcija pomnoži z istim številom.
3. Projekcija vsote vektorjev na poljubno os je enaka vsoti projekcij na isto os členov vektorjev.
4. Projekcija vektorja na os je enaka produktu dolžine projiciranega vektorja in kosinusa kota med vektorjem in osjo:
![]()
 .
.

rešitev. Projicirajmo vektorje na os l kot je opredeljeno v zgornji teoretični referenci. Iz slike 5a je razvidno, da je projekcija vsote vektorjev enaka vsoti projekcij vektorjev. Izračunamo te projekcije:
Najdemo končno projekcijo vsote vektorjev:
Odnos vektorja s pravokotnim kartezičnim koordinatnim sistemom v prostoru
Spoznavanje z pravokotni kartezični koordinatni sistem v prostoru potekal v ustrezni lekciji, po možnosti odprite v novem oknu.
V urejenem sistemu koordinatnih osi 0xyz os Ox klical x-os, os 0y – y-os, in os 0z – nanesite os.

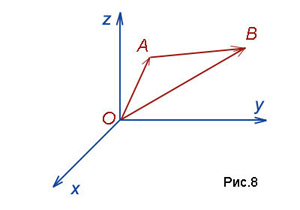
s poljubno točko M vektor vesoljske vezi
klical radijski vektor točke M in ga projiciramo na vsako od koordinatnih osi. Označimo vrednosti ustreznih projekcij:
Številke x, y, z klical koordinate točke M, oz abscisa, ordinata in aplikacija, in so zapisane kot urejena točka števil: M(x; y; z)(slika 6).
Imenuje se vektor enotske dolžine, katerega smer sovpada s smerjo osi enotski vektor(oz ortom) osi. Označimo z
V skladu s tem so enotski vektorji koordinatnih osi Ox, Oj, Oz
![]()
Izrek. Vsak vektor je mogoče razstaviti na enotske vektorje koordinatnih osi:

![]() (2)
(2)
Enakost (2) imenujemo raztezanje vektorja vzdolž koordinatnih osi. Koeficienti tega raztezanja so projekcije vektorja na koordinatne osi. Tako so ekspanzijski koeficienti (2) vektorja vzdolž koordinatnih osi koordinate vektorja.
Po izbiri določenega koordinatnega sistema v prostoru se vektor in trojka njegovih koordinat enolično določata, zato lahko vektor zapišemo v obliki
Vektorski predstavitvi v obliki (2) in (3) sta enaki.
Pogoj kolinearnih vektorjev v koordinatah
Kot smo že omenili, se vektorji imenujejo kolinearni, če so povezani z relacijo
Naj vektorji ![]() . Ti vektorji so kolinearni, če so koordinate vektorjev povezane z relacijo
. Ti vektorji so kolinearni, če so koordinate vektorjev povezane z relacijo
![]() ,
,
to pomeni, da so koordinate vektorjev sorazmerne.
Primer 6 Dani vektorji ![]() . Ali so ti vektorji kolinearni?
. Ali so ti vektorji kolinearni?
rešitev. Ugotovimo razmerje koordinat teh vektorjev:
![]() .
.
Koordinate vektorjev so sorazmerne, zato so vektorji kolinearni ali, kar je isto, vzporedni.
Dolžina vektorja in kosinus smeri
Zaradi medsebojne pravokotnosti koordinatnih osi je dolžina vektorja
![]()
je enaka dolžini diagonale pravokotnega paralelepipeda, zgrajenega na vektorjih
in je izražena z enakostjo
![]() (4)
(4)
Vektor je popolnoma definiran z določitvijo dveh točk (začetka in konca), tako da lahko koordinate vektorja izrazimo s koordinatami teh točk.
Naj bo začetek vektorja v danem koordinatnem sistemu v točki
in konec je pri tem
Iz enakosti
Sledi temu
ali v koordinatni obliki
torej koordinate vektorja so enake razliki istoimenskih koordinat konca in začetka vektorja . Formula (4) ima v tem primeru obliko
Smer vektorja je določena smerni kosinus . To so kosinusi kotov, ki jih vektor sklepa z osema Ox, Oj in Oz. Označimo te kote α , β in γ . Potem lahko kosinuse teh kotov najdemo s formulami
Smerni kosinusi vektorja so tudi koordinate vektorjevega vektorja in s tem vektorskega vektorja

![]() .
.
Ob upoštevanju, da je dolžina vektorskega vektorja enaka eni enoti, tj.
![]() ,
,
dobimo naslednjo enakost za smerne kosinuse:
Primer 7 Poiščite dolžino vektorja x = (3; 0; 4).
rešitev. Dolžina vektorja je
![]()
Primer 8 Dane točke:
Ugotovite, ali je trikotnik, zgrajen na teh točkah, enakokrak.
rešitev. S formulo za vektorsko dolžino (6) poiščemo dolžine stranic in ugotovimo, ali sta dve enaki:

Najdeni sta dve enaki stranici, zato ni treba iskati dolžine tretje stranice, dani trikotnik pa je enakokrak.
Primer 9 Poiščite dolžino vektorja in njegove smerne kosinuse, če ![]() .
.
rešitev. Vektorske koordinate so podane:
![]() .
.
Dolžina vektorja je enaka kvadratnemu korenu vsote kvadratov vektorskih koordinat:
![]() .
.
Iskanje smernih kosinusov:

Sami rešite nalogo o vektorjih in nato poglejte rešitev
Operacije na vektorjih, podanih v koordinatni obliki
Naj sta dana dva vektorja in podana s svojimi projekcijami:
![]()
![]()
Označimo akcije na teh vektorjih.
odgovor:
Lastnosti projekcije:
Lastnosti vektorske projekcije
Lastnost 1.
Projekcija vsote dveh vektorjev na os je enaka vsoti projekcij vektorjev na isto os: ![]()
Ta lastnost vam omogoča, da projekcijo vsote vektorjev zamenjate z vsoto njihovih projekcij in obratno.
Lastnost 2.Če vektor pomnožimo s številom λ, potem se s tem številom pomnoži tudi njegova projekcija na os:
![]()
Nepremičnina 3.
Projekcija vektorja na os l je enaka produktu modula vektorja in kosinusa kota med vektorjem in osjo:
Orthova os. Razčlenitev vektorja na koordinatne vektorje. Vektorske koordinate. Lastnosti koordinat
odgovor:
Vrte sekir.

Pravokotni koordinatni sistem (katere koli dimenzije) je prav tako opisan z nizom enotskih vektorjev, poravnanih s koordinatnimi osemi. Število ortov je enako dimenziji koordinatnega sistema in vse so pravokotne druga na drugo.
V tridimenzionalnem primeru so orte običajno označene
Uporabite lahko tudi simbole IN s puščicami in .
Poleg tega v primeru desnega koordinatnega sistema veljajo naslednje formule z vektorskimi produkti vektorjev:
Razčlenitev vektorja na koordinatne vektorje.
Pravica koordinatne osi je označena z , osi - z , osi - z (slika 1)

Za vsak vektor, ki leži v ravnini, pride do naslednje razgradnje:
Če vektor ![]() se nahaja v prostoru, potem ima razširitev glede na enotske vektorje koordinatnih osi obliko:
se nahaja v prostoru, potem ima razširitev glede na enotske vektorje koordinatnih osi obliko:
Vektorske koordinate:
Če želite izračunati koordinate vektorja, če poznate koordinate (x1; y1) njegovega začetka A in koordinate (x2; y2) njegovega konca B, morate od končnih koordinat odšteti koordinate začetka: (x2 - x1; y2 - y1).
Lastnosti koordinat.
Vzemimo koordinatno premico z izhodiščem v točki O in enotskim vektorjem i. Potem je za vsak vektor a na tej premici: a = axi.
Številsko os imenujemo koordinata vektorja a na koordinatni osi.
Lastnost 1. Pri dodajanju vektorjev na osi se dodajo njihove koordinate.
Lastnost 2. Ko vektor pomnožimo s številom, se njegova koordinata pomnoži s tem številom.
Skalarni produkt vektorjev. Lastnosti.
odgovor:
Skalarni produkt dveh neničelnih vektorjev je število,
enak zmnožku teh vektorjev s kosinusom kota med njima.
![]()
![]()
Lastnosti:
1. Skalarni produkt ima komutativno lastnost: ab=ba

Skalarni produkt koordinatnih vektorjev. Določanje skalarnega produkta vektorjev, podanih z njihovimi koordinatami.
odgovor:
Pikčasti produkt (×) ali
| (X) | jaz | J | K |
| jaz | |||
| J | |||
| K |
Določanje skalarnega produkta vektorjev, podanih z njihovimi koordinatami.
Skalarni produkt dveh vektorjev in podanega z njunima koordinatama lahko izračunamo s formulo
![]()
Vektorski produkt dveh vektorjev. Lastnosti vektorskega izdelka.
odgovor:
Trije nekoplanarni vektorji tvorijo desno trojko, če je od konca tretjega vektorja rotacija od prvega v drugega v nasprotni smeri urnega kazalca. Če v smeri urinega kazalca - nato levo., če ne, potem v nasprotni smeri ( pokaži, kako je pokazal z "ročaji")
Navzkrižni produkt vektorja A na vektor b imenovan vektor s katero:
1. Pravokotno na vektorje A in b
2. Ima dolžino, ki je numerično enaka površini paralelograma, oblikovanega na a in b vektorji
![]()
3. Vektorji, a,b, In c tvorijo pravo trojko vektorjev
Lastnosti:
1. ![]()
3. ![]()
4. ![]()

Vektorski produkt koordinatnih vektorjev. Določanje vektorskega produkta vektorjev, podanih z njihovimi koordinatami.
odgovor:
Vektorski produkt koordinatnih vektorjev.

Določanje vektorskega produkta vektorjev, podanih z njihovimi koordinatami.
Naj sta vektorja a = (x1; y1; z1) in b = (x2; y2; z2) podana s svojimi koordinatami v pravokotnem kartezičnem koordinatnem sistemu O, i, j, k, trojka i, j, k pa je prav.
A in b razširimo glede na bazne vektorje:
a = x 1 i + y 1 j + z 1 k, b = x 2 i + y 2 j + z 2 k.
Z uporabo lastnosti vektorskega produkta dobimo
[A; b] ==
= x 1 x 2 + x 1 y 2 + x 1 z 2 +
+ y 1 x 2 + y 1 y 2 + y 1 z 2 +
+ z 1 x 2 + z 1 y 2 + z 1 z 2 . (1)
Po definiciji vektorskega produkta najdemo
= 0, = k, = - j,
= - k, = 0, = i,
= j, = - i. = 0.
Glede na te enakosti lahko formulo (1) zapišemo takole:
[A; b] = x 1 y 2 k - x 1 z 2 j - y 1 x 2 k + y 1 z 2 i + z 1 x 2 j - z 1 y 2 i
[A; b] = (y 1 z 2 - z 1 y 2) i + (z 1 x 2 - x 1 z 2) j + (x 1 y 2 - y 1 x 2) k. (2)
Formula (2) daje izraz za navzkrižni produkt dveh vektorjev, podanih z njunima koordinatama.
Nastala formula je okorna.Z zapisom determinant jo lahko zapišete v drugi obliki, ki je bolj priročna za zapomniti:
Običajno je formula (3) zapisana še krajše:

Reševanje problemov o ravnotežju konvergentnih sil s konstruiranjem zaprtih poligonov sil je povezano z okornimi konstrukcijami. Univerzalna metoda za reševanje takih problemov je prehod na določanje projekcij danih sil na koordinatne osi in delovanje s temi projekcijami. Os se imenuje ravna črta, ki ji je dodeljena določena smer.
Projekcija vektorja na os je skalarna vrednost, ki je določena z odsekom osi, odrezanim z navpičnicami, spuščenimi nanj z začetka in konca vektorja.
Projekcija vektorja se šteje za pozitivno, če smer od začetka projekcije do njenega konca sovpada s pozitivno smerjo osi. Projekcija vektorja se šteje za negativno, če je smer od začetka projekcije do njenega konca nasprotna pozitivni smeri osi.
Tako je projekcija sile na koordinatno os enaka produktu modula sile in kosinusa kota med vektorjem sile in pozitivno smerjo osi.
Razmislite o številnih primerih projiciranja sil na os:
Vektor sile F(slika 15) tvori oster kot s pozitivno smerjo osi x.

Da bi našli projekcijo, od začetka in konca vektorja sile spustimo pravokotnice na os oh; dobimo
1. Fx = F cosα
Projekcija vektorja je v tem primeru pozitivna
Sila F(slika 16) je s pozitivno smerjo osi X top kot α.

Potem F x= F cos α, a ker je α = 180 0 - φ,
F x= F cosα = F cos180 0 - φ =- F cos phi.
Projekcija sile F na os oh v tem primeru negativna.
Sila F(slika 17) pravokotno na os oh.

Projekcija sile F na os X nič
F x= F cos 90° = 0.
Sila, ki se nahaja na ravnini howe(slika 18), lahko projiciramo na dve koordinatni osi Oh in OU.

Moč F lahko razdelimo na komponente: F x in F y . Vektorski modul F x je enak vektorski projekciji F na os vol, in modul vektorja F y je enak projekciji vektorja F na os oy.
Od Δ OAB: F x= F cosα, F x= F sinα.
Od Δ SLA: F x= F cos phi, F x= F sin phi.
Modul sile je mogoče najti s pomočjo Pitagorovega izreka:
![]()
Projekcija vektorske vsote ali rezultante na poljubno os je enaka algebraični vsoti projekcij členov vektorjev na isto os.
Razmislite o konvergentnih silah F 1 , F 2 , F 3 in F 4, (slika 19, a). Geometrična vsota ali rezultanta teh sil F določena z zapiralno stranjo poligona sil


Spusti iz oglišč poligona sil na os x pravokotnice.
Upoštevajoč dobljene projekcije sil neposredno iz izvedene konstrukcije, imamo
F= F 1x+ F 2x+ F 3x+ F 4x
kjer je n število členov vektorjev. Njihove projekcije vstopajo v zgornjo enačbo z ustreznim predznakom.
V ravnini lahko geometrijsko vsoto sil projiciramo na dve koordinatni osi, v prostoru pa na tri.
projekcija vektor na os imenujemo vektor, ki ga dobimo tako, da pomnožimo skalarno projekcijo vektorja na to os in enotski vektor te osi. Na primer, če je x skalarna projekcija vektor A na osi x, nato x jaz- njegova vektorska projekcija na to os.
Označimo vektorska projekcija tako kot sam vektor, vendar z indeksom osi, na katero je vektor projiciran. Torej, vektorska projekcija vektorja A na osi x pomenijo A x ( mastnačrka, ki označuje vektor in indeks imena osi) ali (nekrepka črka, ki označuje vektor, vendar s puščico na vrhu (!) in indeksom imena osi).
Skalarna projekcija vektor na os se imenuje število, katere absolutna vrednost je enaka dolžini segmenta osi (v izbranem merilu), ki je zaprt med projekcijama začetne in končne točke vektorja. Ponavadi namesto izraza skalarna projekcija preprosto reci - projekcija. Projekcija je označena z isto črko kot projicirani vektor (v normalnem, nekrepkem zapisu), z indeksom (običajno) imena osi, na katero je ta vektor projiciran. Na primer, če je vektor projiciran na os x A, potem je njegova projekcija označena z x. Pri projiciranju istega vektorja na drugo os, če je os Y , bo njena projekcija označena z y .
Za izračun projekcije vektor na osi (na primer osi X) je treba od koordinate njene končne točke odšteti koordinato začetne točke, tj.
in x \u003d x k - x n.
Projekcija vektorja na os je število. Poleg tega je lahko projekcija pozitivna, če je vrednost x k večja od vrednosti x n,
negativna, če je vrednost x k manjša od vrednosti x n
in enako nič, če je x k enako x n.
Projekcijo vektorja na os lahko najdemo tudi tako, da poznamo modul vektorja in kot, ki ga tvori s to osjo.
Iz slike je razvidno, da je a x = a Cos α
to pomeni, da je projekcija vektorja na os enaka produktu modula vektorja in kosinusa kota med smerjo osi in smer vektorja. Če je kot oster, potem
Cos α > 0 in a x > 0, in če je top, potem je kosinus topega kota negativen in tudi projekcija vektorja na os bo negativna.
Koti, šteti od osi v nasprotni smeri urinega kazalca, se štejejo za pozitivne, v smeri pa za negativne. Ker pa je kosinus soda funkcija, to je Cos α = Cos (− α), se pri izračunu projekcij lahko koti štejejo v smeri urinega kazalca in nasprotni.
Da bi našli projekcijo vektorja na os, je treba modul tega vektorja pomnožiti s kosinusom kota med smerjo osi in smerjo vektorja.
Vektorske koordinate so koeficienti edine možne linearne kombinacije baznih vektorjev v izbranem koordinatnem sistemu, ki je enak danemu vektorju.
kjer so koordinate vektorja.
Točkovni produkt vektorjev
SCOAL PRODUKT VEKTORJEV[- v končnodimenzionalnem vektorski prostor je definiran kot vsota zmnožkov istih komponent pomnoženega vektorji.
Na primer, S. p. a = (a 1 , ..., a n) In b = (b 1 , ..., b n):
(a , b ) = a 1 b 1 + a 2 b 2 + ... + a n b n
A. Projekcija točke A na os PQ (slika 4) je vzmetnica a navpičnice, spuščene iz dane točke na dano os. Os, na katero projiciramo, se imenuje projekcijska os.
b. Naj sta podani dve osi in vektor A B, kot je prikazano na sl. 5.

Vektor, katerega začetek je projekcija začetka in konec - projekcija konca tega vektorja, se imenuje projekcija vektorja A B na os PQ, Zapisano je tako;
![]()
Včasih indikator PQ ni napisan na dnu, to se naredi v primerih, ko razen PQ ni druge osi, na katero bi lahko projicirali.
z. Izrek I. Vrednosti vektorjev, ki ležijo na isti osi, so povezane kot vrednosti njihovih projekcij na katero koli os.

Naj so podane osi in vektorji, prikazani na sliki 6. Iz podobnosti trikotnikov je razvidno, da so dolžine vektorjev povezane kot dolžine njihovih projekcij, tj.
![]()
Ker so vektorji na risbi usmerjeni v različne smeri, imajo njihove velikosti različne vrednosti, zato
![]()
Očitno imajo vrednosti projekcije tudi drugačen znak:
![]()
zamenjamo (2) v (3) v (1), dobimo
![]()
Če obrnemo znake, dobimo
![]()
Če sta vektorja enako usmerjena, potem bo ena smer in njihove projekcije; v formulah (2) in (3) ne bo znakov minus. Če nadomestimo (2) in (3) v enakost (1), takoj dobimo enakost (4). Tako je izrek dokazan za vse primere.

d. Izrek II. Vrednost projekcije vektorja na katero koli os je enaka vrednosti vektorja, pomnoženi s kosinusom kota med osjo projekcij in osjo vektorja. Naj bo vektor podan osi, kot je prikazano na sliki . 7. Konstruirajmo vektor, ki je enako usmerjen s svojo osjo in odložen, na primer, od presečišča osi. Naj bo njegova dolžina enaka ena. Potem njegova vrednost
![]()
Novi članki
- Zakaj se pojavi morska bolezen?
- Kako iskati nahajališča gline Kje kopljejo pesek in glino
- Kaj počnejo jetra v telesu
- Učinek tople grede v ozračju: vzroki in posledice
- Recept za dobro domače testo za rezance
- Katera leta so srednji vek
- Na kratko obdobje srednjega veka
- Lisica: zanimiva dejstva o rdeči lisici. Zanimiva dejstva iz življenja lisic
- Kakšne so koristi koprive za ljudi?
- Žvečilni gumi. Kako nastane žvečilni gumi? Kako narediti gumi sam? Kako so gumijasti trakovi izdelani v tovarni
Priljubljeni članki
- Koliko v povprečju tehta medved?
- Galileo Galilei - biografija življenja in njegova odkritja Kje se je rodil in živel Galileo Galilei
- Kaj pomeni izraz "Sizifovo delo"?
- Sklanjatev okrajšave gost
- sadje molja. Dvokaličnica. Družina stročnic (metuljnice). Kaj smo se naučili
- Kako izkopati in shraniti gomolje dalije: podrobna navodila
- Kaj pokaže bris flore pri ženskah?
- Govor nevestinega očeta na poroki
- Kartezične koordinate ravninskih točk
- Kako nositi kavbojke z visokim pasom: skrivnosti stila